Italo Almirante
PhD Researcher in Robotics
Progetto e sviluppo applicazioni per il controllo di sistemi robotici, dal controllo embedded e i layer di comunicazione fino a navigazione autonoma, manipolazione, simulazione e coordinamento del traffico multi-robot.
Il mio lavoro comprende integrazione di sistema e ricerca sull'autonomia di robot industriali e outdoor, con particolare attenzione a coordinamento di flotte, mobile manipulation, e space robotics.

Di cosa mi occupo
Autonomia multi-robot
Pianificazione scalabile, coordinamento di flotte e framework di simulazione per scenari logistici dinamici.
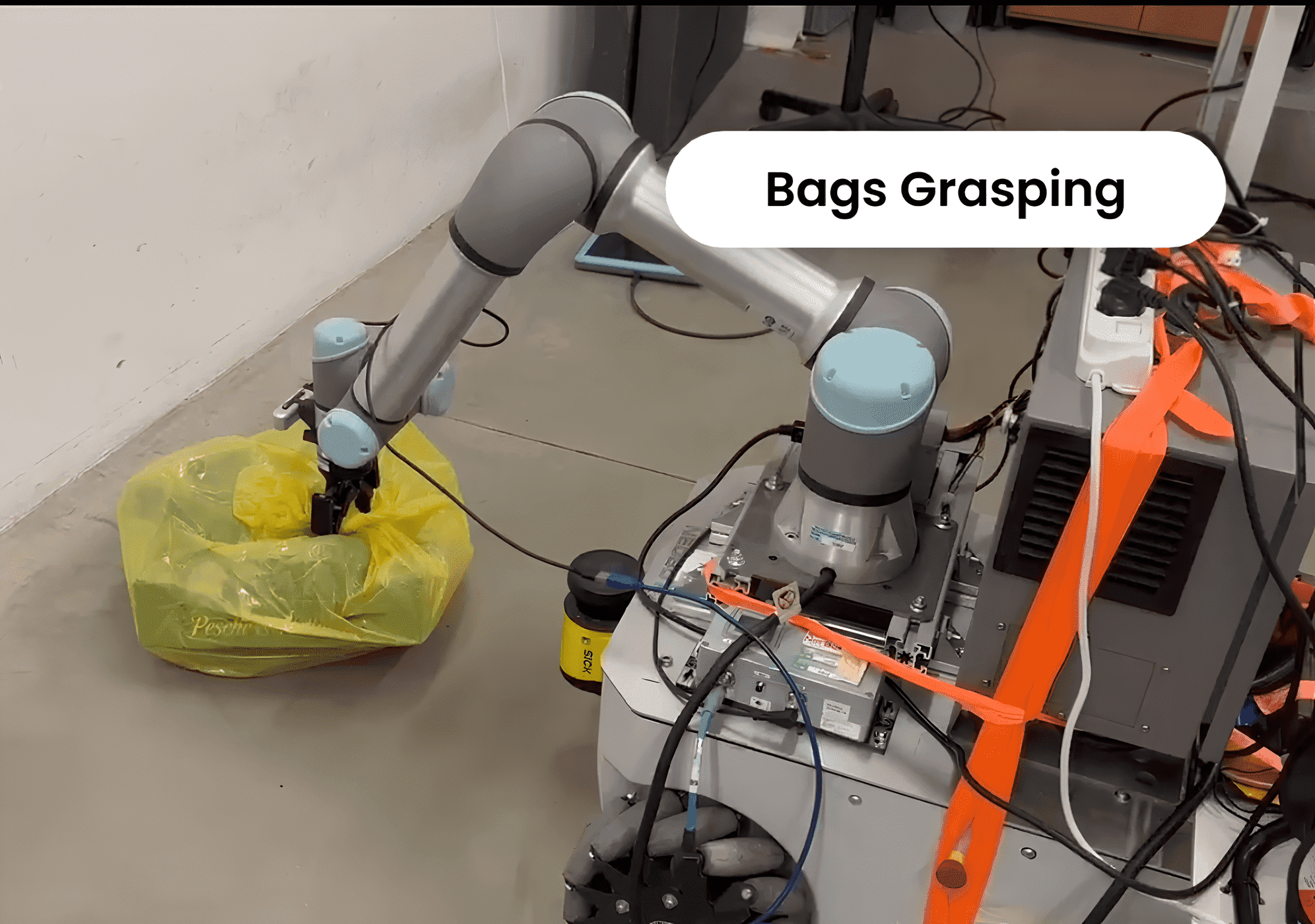
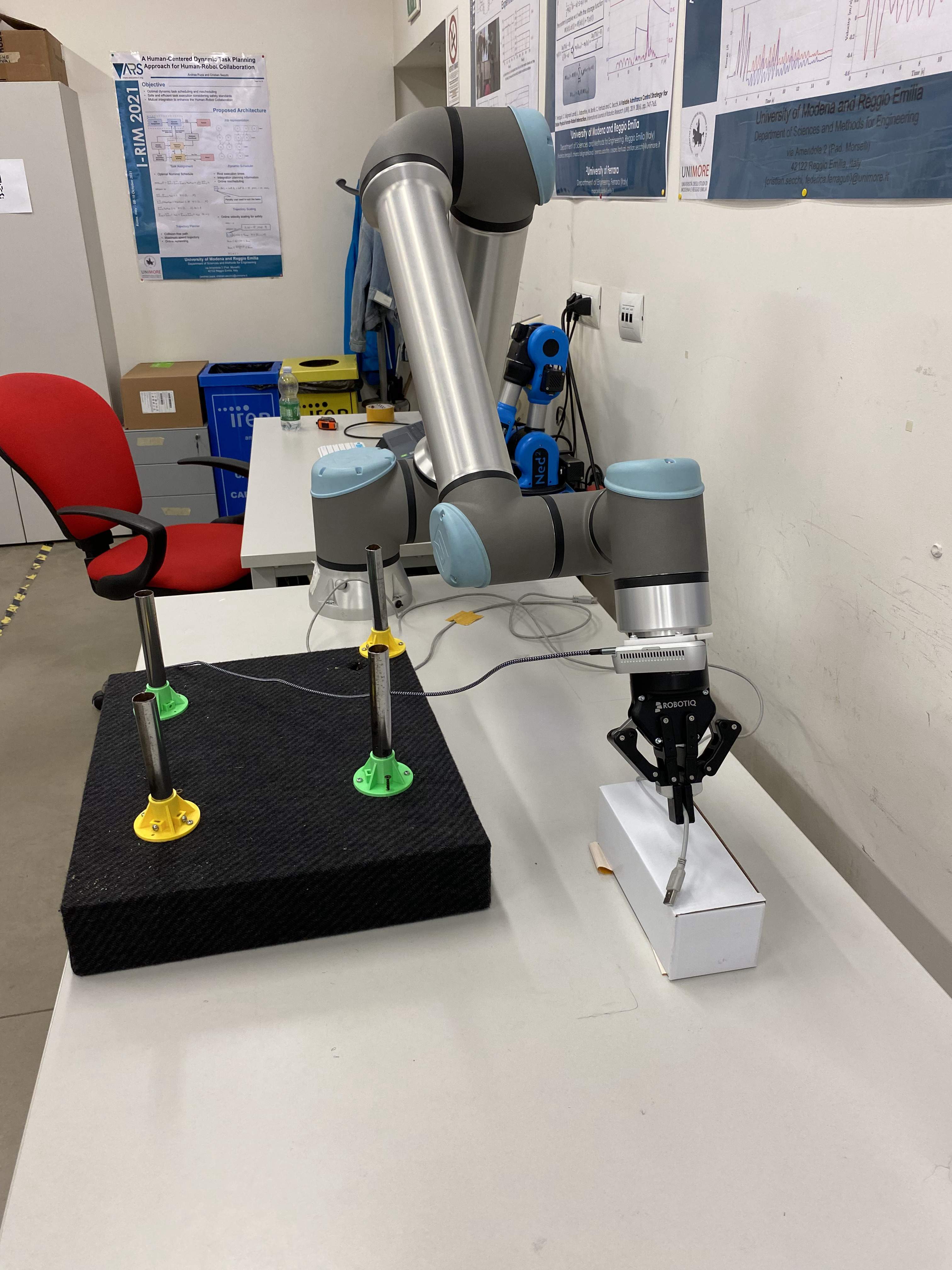
Mobile manipulation
Manipolazione di oggetti deformabili guidata da: percezione 3D, interazione con controllo di forza e architetture software riusabili e modulari.
Space robotics systems
Prototipi di rover autonomi, con bracci robotici e sottosistemi per l'analisi scientifica, l'esplorazione e la navigazione autonoma.
Progetti in evidenza
Ricerca
Multi-Robot Planning
Framework in C++ e ROS2 per coordinamento di flotte e autonomia robusta.
Ricerca
Manipolazione di oggetti deformabili
Percezione, grasping, co-manipolazione e interazione con manipulatori mobili con controlli a feedback di forza.
Ricerca
DLO Perception and Grasping
Segmentazione di cavi, stima della posa 3D, validazione in CoppeliaSim ed esecuzione sim-to-real.

ProjectRED
Navigazione autonoma e digital twin
Autonomous navigation, localizzazione, gestione ostacoli e workflow ROS2-Unity.

ProjectRED
Braccio rover e sampling
Controllo del manipolatore, probing, deep sampling e integrazione di sottosistemi per applicazioni outdoor.
Software
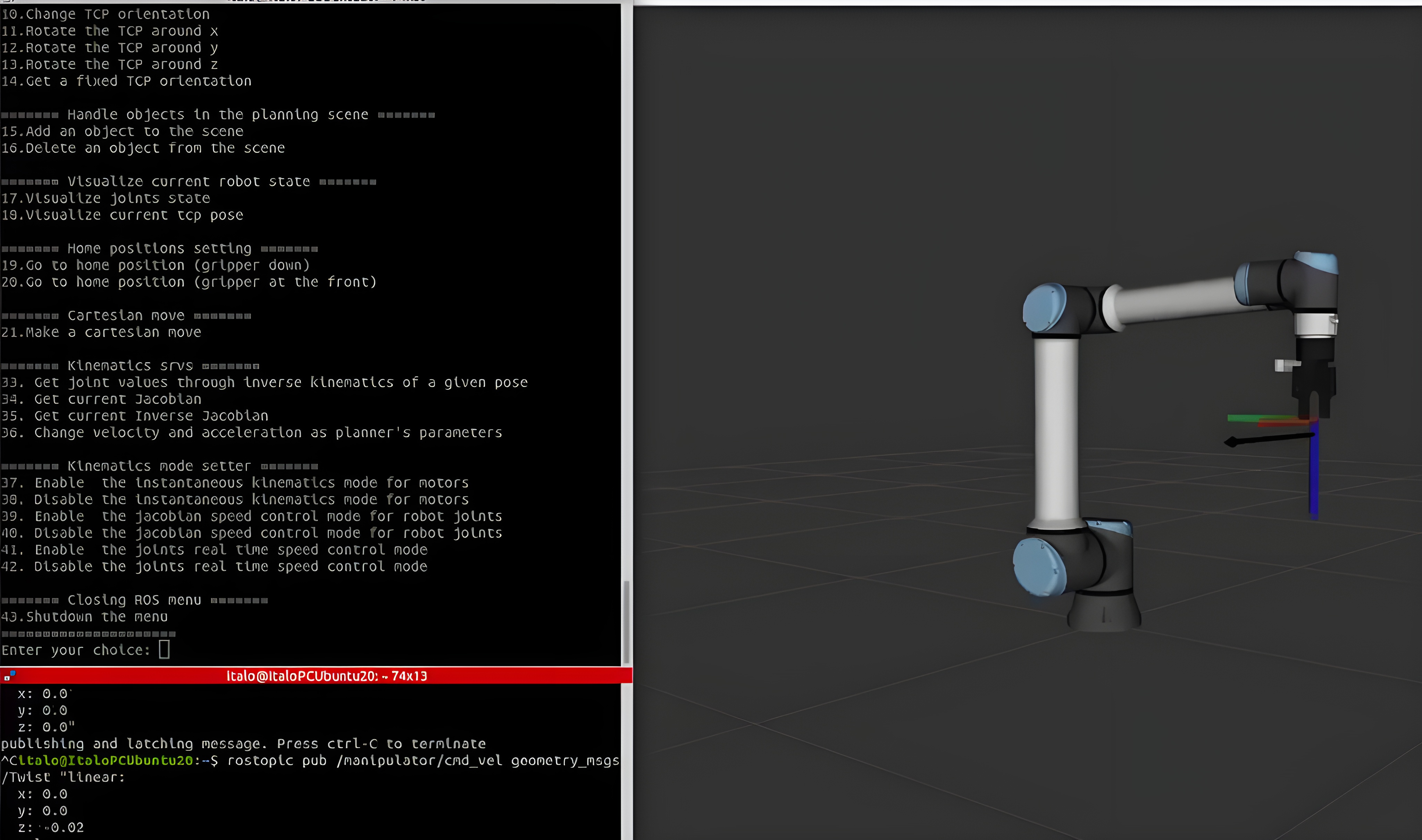
Manipulators Framework
Software riusabile per pianificazione e controllo di manipolatori commerciali e custom.
Profilo ingegneristico
Domini principali
- Coordinamento multi-agent e multi-robot
- Manipolazione robotica "soft"
- Navigazione autonoma e digital twin
- Robotica guidata da visione e AI
Strumenti principali
- ROS1, ROS2, MoveIt, Nav2
- C++, Python, MATLAB, RobotStudio
- CoppeliaSim, Unity, Gazebo, MuJoCo
- RGB-D perception (RealSense, Zed2)
- Computer Vision (YOLO, SAM)
- Robotics platforms (Neobotics, MiR, UR)
- STM32, CAN, CANopen, USART/UART
Esplora il sito
Progetti
Pagine dettagliate su ricerca, software e sistemi robotici integrati.
Pubblicazioni
Una sezione oer articoli scientifici, output di ricerca e riferimenti tecnici.
Novità e aggiornamenti
Uno spazio dedicato a future news, milestone, opportunità e annunci.