Manipulator Framework
Il progetto
Questo progetto raccoglie l’infrastruttura software che ho sviluppato ed esteso per planning e controllo di manipolatori, partendo da prototipi in ROS1 e arrivando a un’evoluzione più modulare in ROS2.
L’obiettivo non è un controller specifico per un singolo robot, ma un layer software riusabile capace di supportare manipolatori, end-effector e configurazioni di task differenti.
Il mio ruolo
Questo lavoro si colloca tra sviluppo software personale ed estensioni collaborative realizzate in progetti robotici più ampi.
- Implementazione iniziale in ROS1 durante tesi e tirocinio
- Riuso ed estensione in contesti rover e manipulation
- Evoluzione continua verso wrapper ROS2 e maggiore modularità
Obiettivi di progetto
- Integrazione modulare con planner
- Struttura il più possibile manipulator-agnostic
- Separazione chiara tra kinematics, execution logic e task-level control
- Riusabilità tra simulazione e sistemi reali
- Estensione più semplice verso manipolatori diversi e setup di mobile manipulation
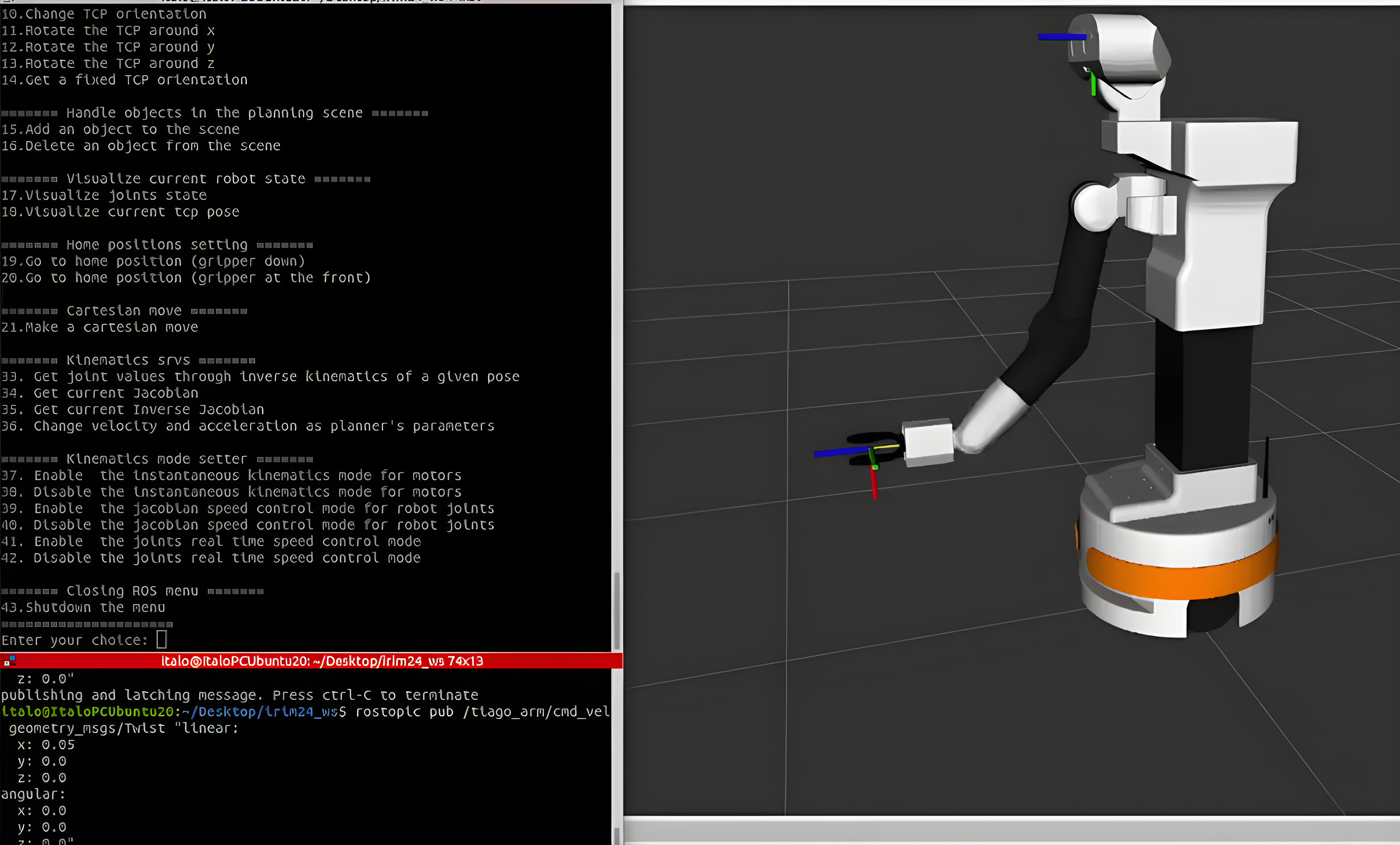
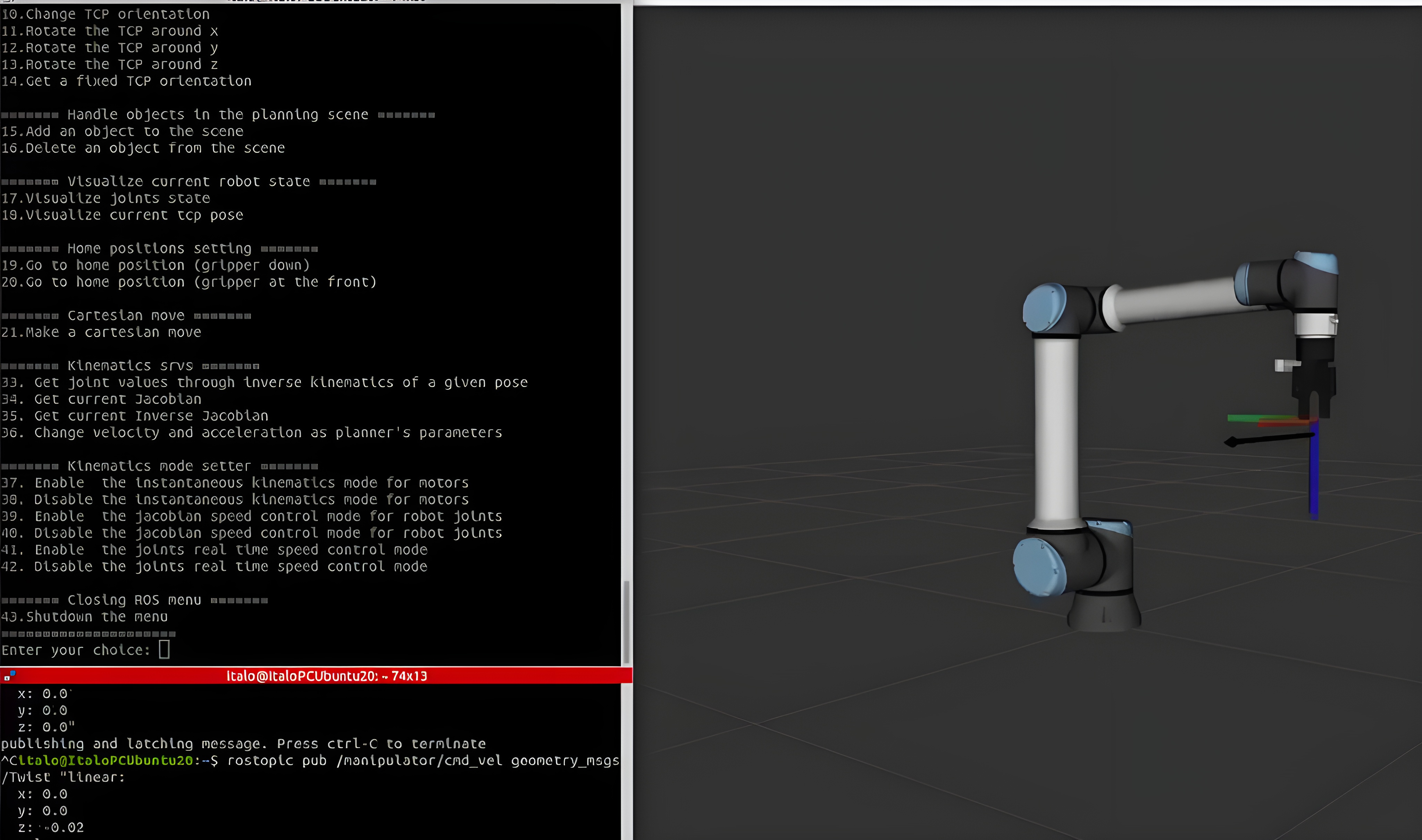
- Supporto per cinematica diretta e inversa
- Controllo di velocità real-time in spazio cartesiano e di giunto