Coordinamento Multi-Robot in Scenari Logistici Dinamici
ICRA 2026 Workshop
Il progetto
Questo progetto rappresenta la principale direzione di ricerca del mio PhD e si concentra sul coordinamento scalabile, robusto e flessibile di flotte robotiche in ambienti warehouse dinamici.
Ho progettato e sviluppato un framework completo in C++ integrato con ROS2 e CoppeliaSim, con supporto a strategie di pianificazione event-based e periodiche. L’obiettivo è studiare il coordinamento multi-robot in condizioni operative realistiche, dove i goal cambiano online, i robot possono subire errori di esecuzione e l’ambiente non è statico.
Il mio ruolo
Questo lavoro è interamente mio sul piano della progettazione di sistema e dell’implementazione.
- Progettazione dell’architettura software
- Sviluppo del framework di simulazione e planning in C++
- Integrazione con ROS2 e CoppeliaSim
- Ricerca su MAPF, TAPF e decision making per la logistica
- Esplorazione di tecniche di Reinforcement Learning per ottimizzazione e adattamento
Elementi tecnici principali
- Simulazioni di flotte con oltre 250 robot
- Online planning sotto i 100 ms in scenari dinamici
- Modalità di ripianificazione event-triggered e periodica
- Aggiornamento dinamico dei goal e replanning execution-aware
- Gestione di conflitti e ostacoli
- Struttura modulare per futura integrazione di layer decisionali learning-based
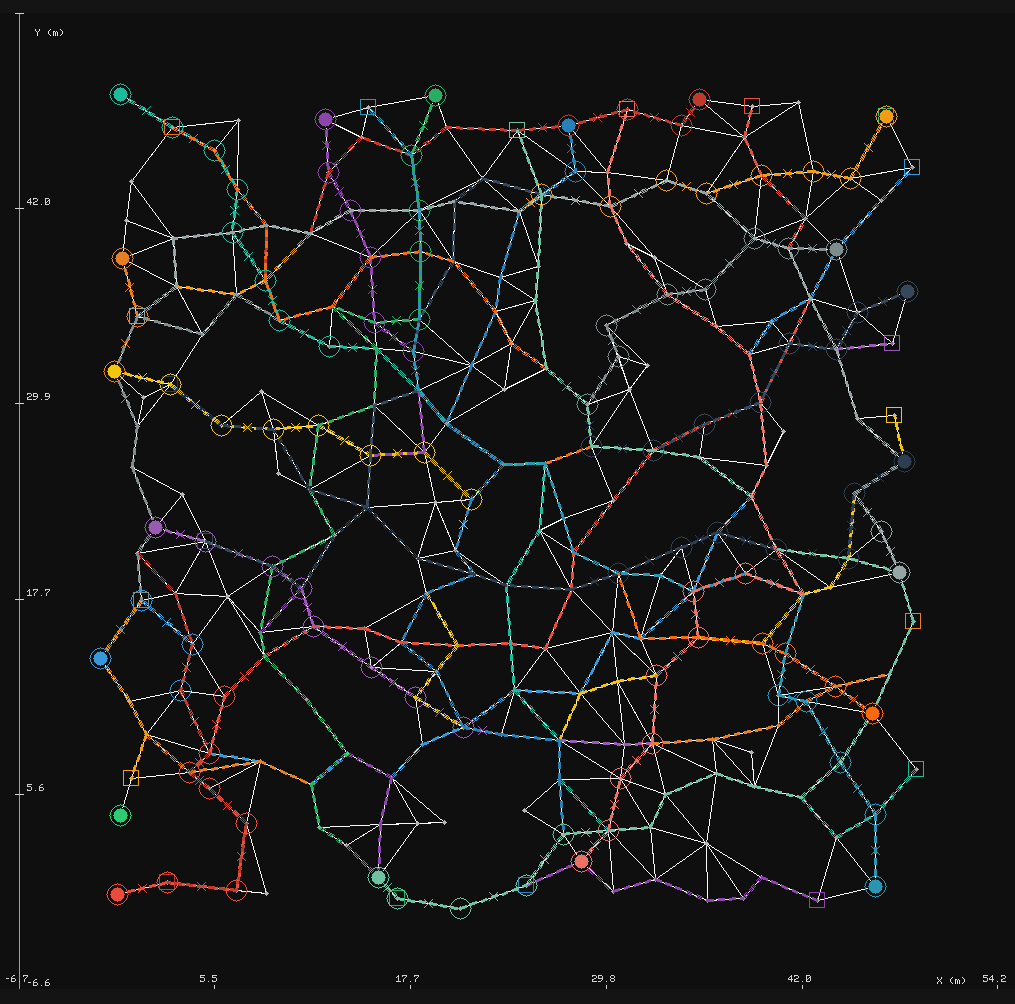
Traiettorie pianificate su un ambiente warehouse basato su roadmap per agenti multipli.
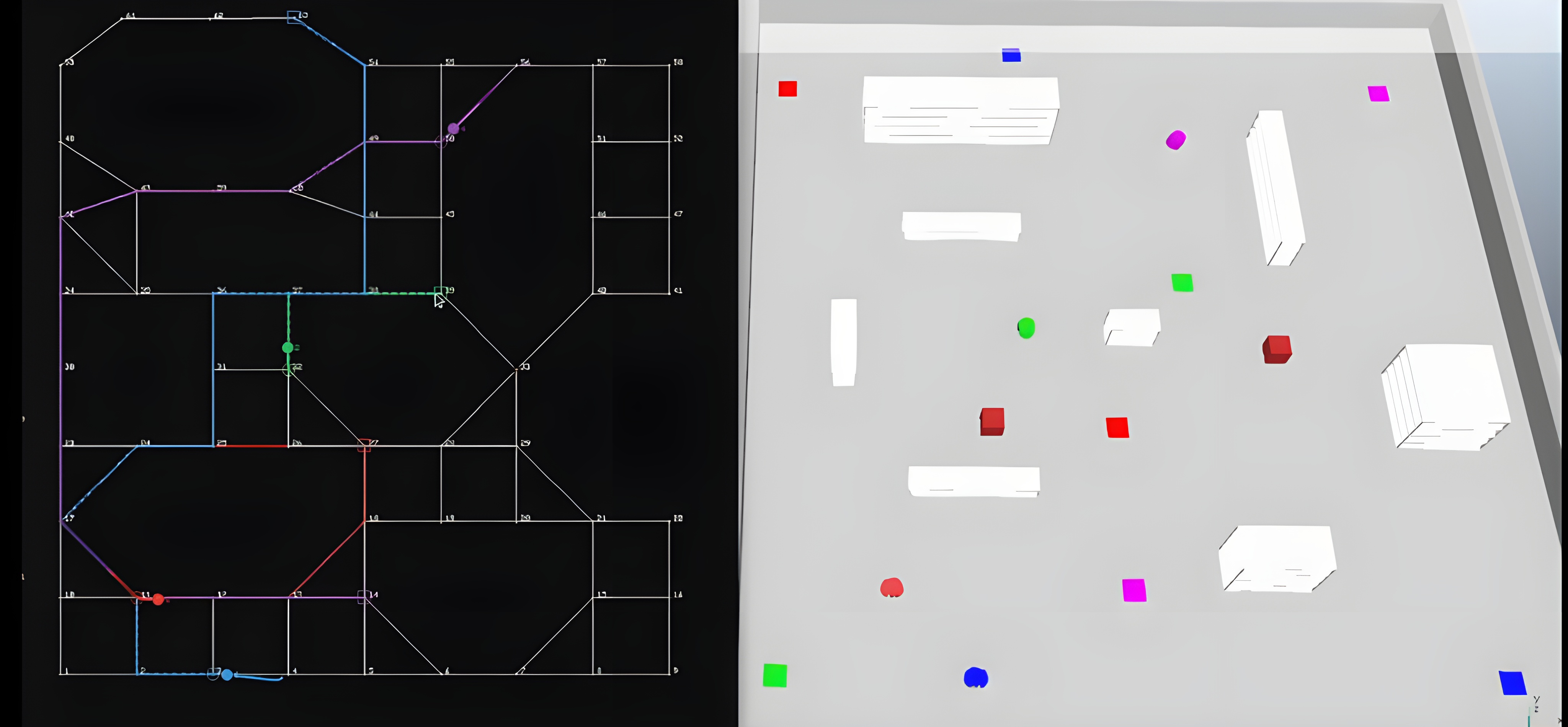
Simulazione in CoppeliaSim di quattro robot in un ambiente di tipo warehouse.
Stack
- C++
- ROS2
- CoppeliaSim
- Multi-agent path finding
- Task allocation
- Reinforcement Learning per ottimizzazione logistica