ProjectRED Rover
Questa pagina raccoglie il principale lavoro robotico che ho svolto in ProjectRED, includendo leadership tecnica e manageriale, supervisione dell’architettura software, navigazione autonoma, manipolazione rover e integrazione di sottosistemi.
Storia in ProjectRED e leadership


Sono entrato in ProjectRED inizialmente come control software developer, poi ho ricoperto il ruolo di Project Manager e successivamente ho continuato come external advisor e robotics supervisor.
Il mio contributo copre sia l’esecuzione ingegneristica sia responsabilità di leadership.
Ambito di leadership e coordinamento
- Leadership di un team eterogeneo
- Pianificazione, task allocation e supervisione tecnica delle attività software
- Esperienza di gestione budget durante l’anno in cui sono stato team leader
- Supporto alle decisioni di architettura software e all’integrazione dei sottosistemi negli anni successivi
- Coordinamento tra controllo, robotica e validazione a livello di sistema
Storia competitiva rilevante rispetto al mio ruolo
- ERC 2022 Remote: 3° posto
- ERC 2023 Remote: 3° posto
- ERC 2023 On-Site: 9° posto, miglior risultato on-site di ProjectRED finora
- Budget del team durante il mio anno da Project Manager: oltre 60k euro
- Budget del team negli anni successivi: circa 30k euro
Navigazione autonoma e digital twin
Il progetto
Una parte importante del lavoro sul rover ha riguardato la navigazione autonoma dalla simulazione fino al deployment in campo.
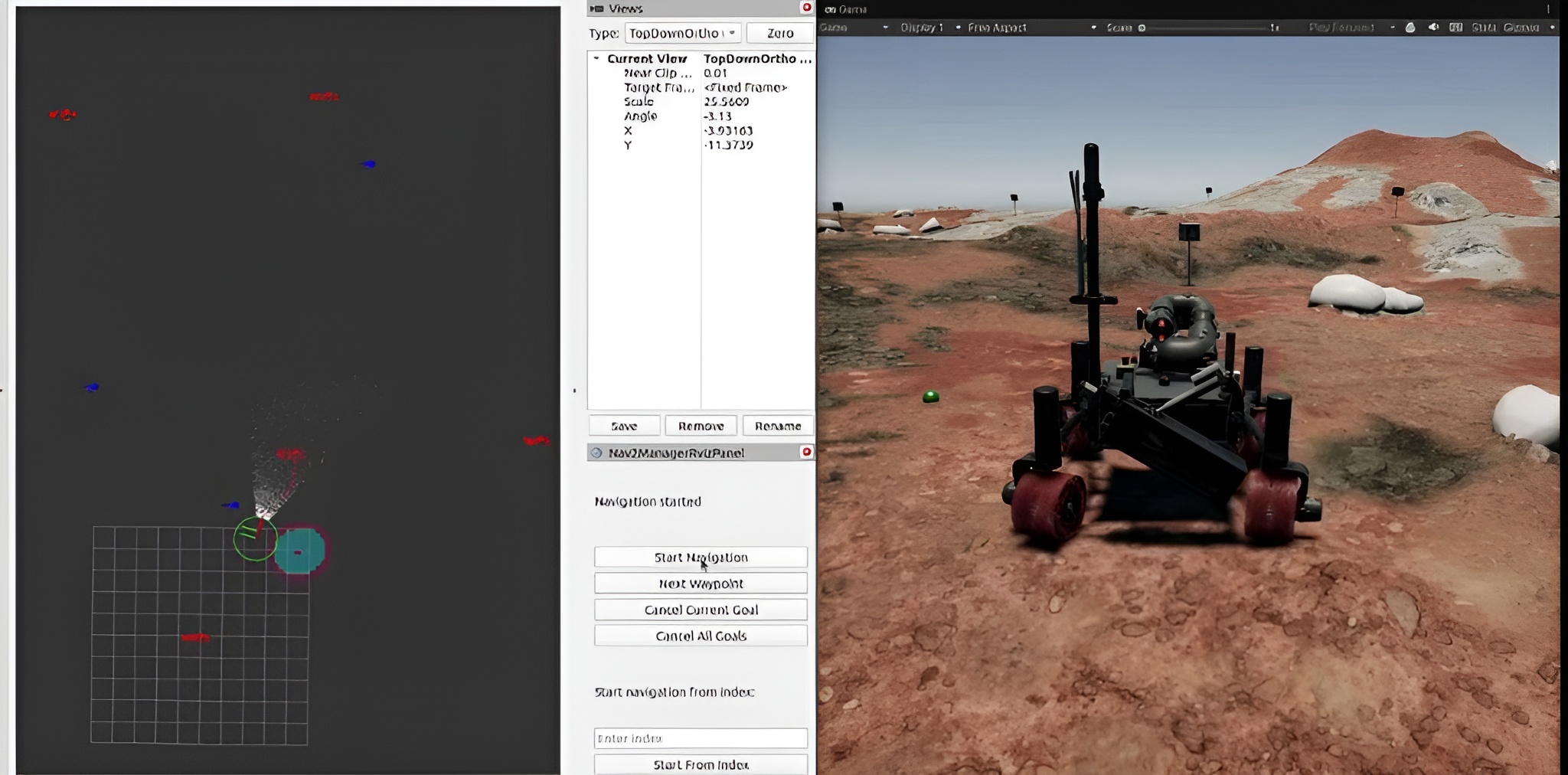
Ho collaborato all’architettura di controllo autonomo del rover e ho supervisionato la costruzione di un digital twin ROS2 più Unity usato per validare i workflow di navigazione prima dei test reali.
Contenuto tecnico
- Digital twin ad alta fedeltà in Unity più ROS2 per validazione e testing
- Stack di navigazione autonoma con gestione ostacoli in tempo reale
- Pipeline di localizzazione che combina wheel odometry, visual odometry e landmark-based estimation
- Verifiche di coerenza simulation-to-reality per il deployment in campo
- Integrazione senza Nav2 e logiche custom per obstacle filtering
Braccio rover, probing e deep sampling
Il progetto
Ho inoltre collaborato al sottosistema del braccio robotico e all’integrazione delle funzionalità orientate ai task scientifici.
Questo include controllo del manipolatore, esecuzione del grasping e teleoperazione remota per operazioni di precisione.
Contenuto tecnico
- Routines e trajectory planning con MoveIt2
- Comunicazione motori orientata a CANopen e coordinamento dei sottosistemi
- Teleoperation remota per movimenti di precisione
- Detection e allineamento della provetta per approccio autonomo

Task di probing nel digital twin Unity.
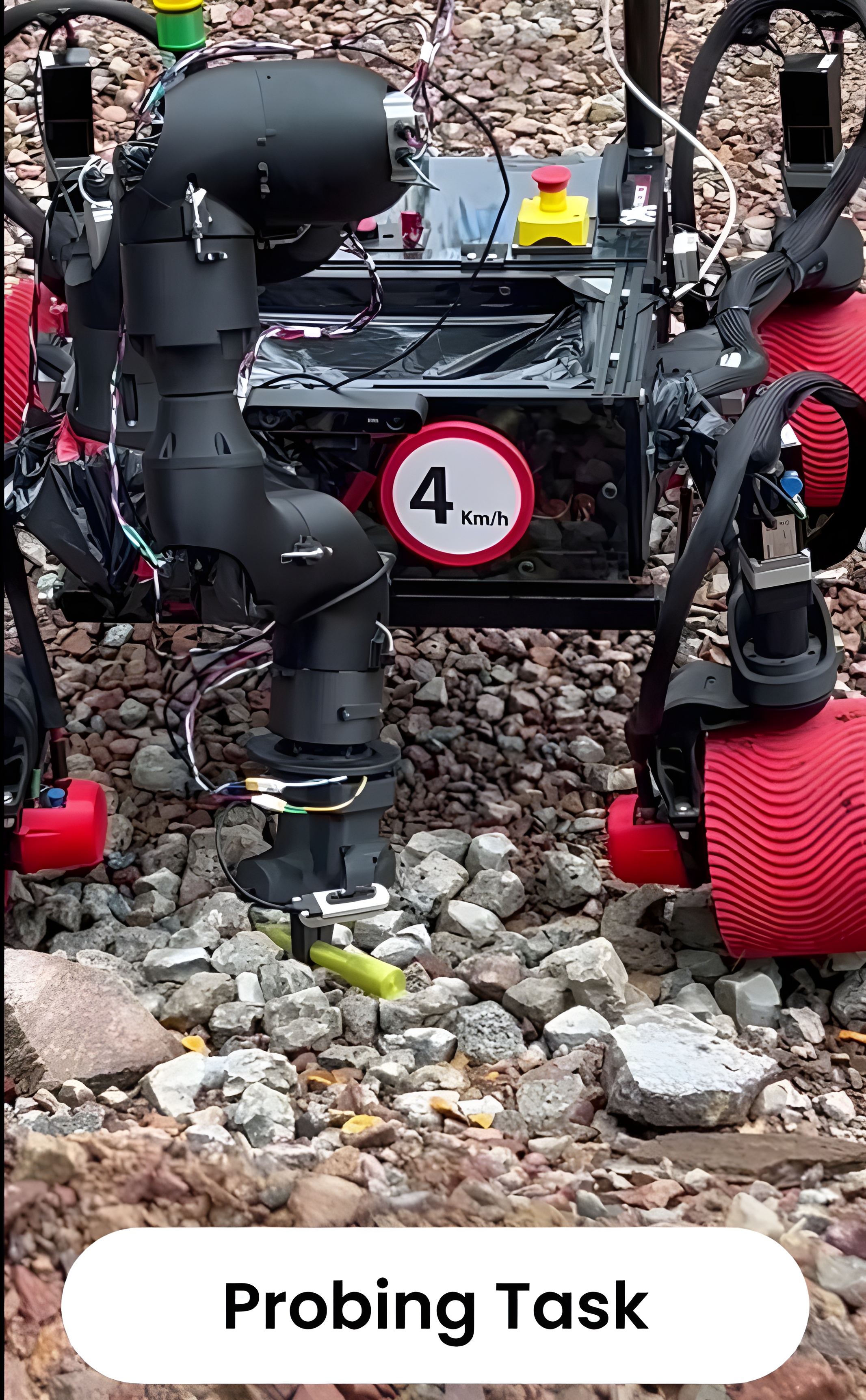
Task di probing in ambiente reale.
Sottosistema di drilling e sampling
La piattaforma rover includeva anche un sottosistema di drill e un workflow di deep sampling. Nel sito questo viene presentato come sottosistema collaborativo a cui ho contribuito all’interno di un contesto di team più ampio, e non come progetto individuale autonomo.
Certificati e riferimenti pubblici
Nota sull’ownership
ProjectRED è, per sua natura, un lavoro di team multidisciplinare. Questa pagina riflette il mio ruolo reale: contributo diretto forte alle attività di robotica e controllo, responsabilità di leadership e coordinamento, e supervisione dell’architettura software e dell’integrazione, senza presentare il rover come un progetto esclusivamente individuale.