Italo Almirante
PhD Researcher in Robotics
I design and build control applications for robotic systems across the full engineering stack, from embedded control and communication layers to autonomous navigation, manipulation, simulation, and multi-robot traffic coordination.
My work combines hands-on engineering, system integration, and research on robust autonomy for industrial and field robotics, with a strong focus on warehouse coordination, mobile manipulation, and space robotics.

What I work on
Multi-robot autonomy
Scalable planning, fleet coordination, and simulation frameworks for dynamic warehouse scenarios.
Mobile manipulation
Perception-driven manipulation of deformable objects, force-aware interaction, and modular and reusable manipulation software architectures.
Space robotics systems
Autonomous rover prototypes, with robotic arms and sub-systems for scientific analyses, autonomous exploration and navigation.
Selected project highlights
Research
Multi-Robot Planning
C++ and ROS2 framework for large-scale warehouse coordination, and robust autonomy.
Research
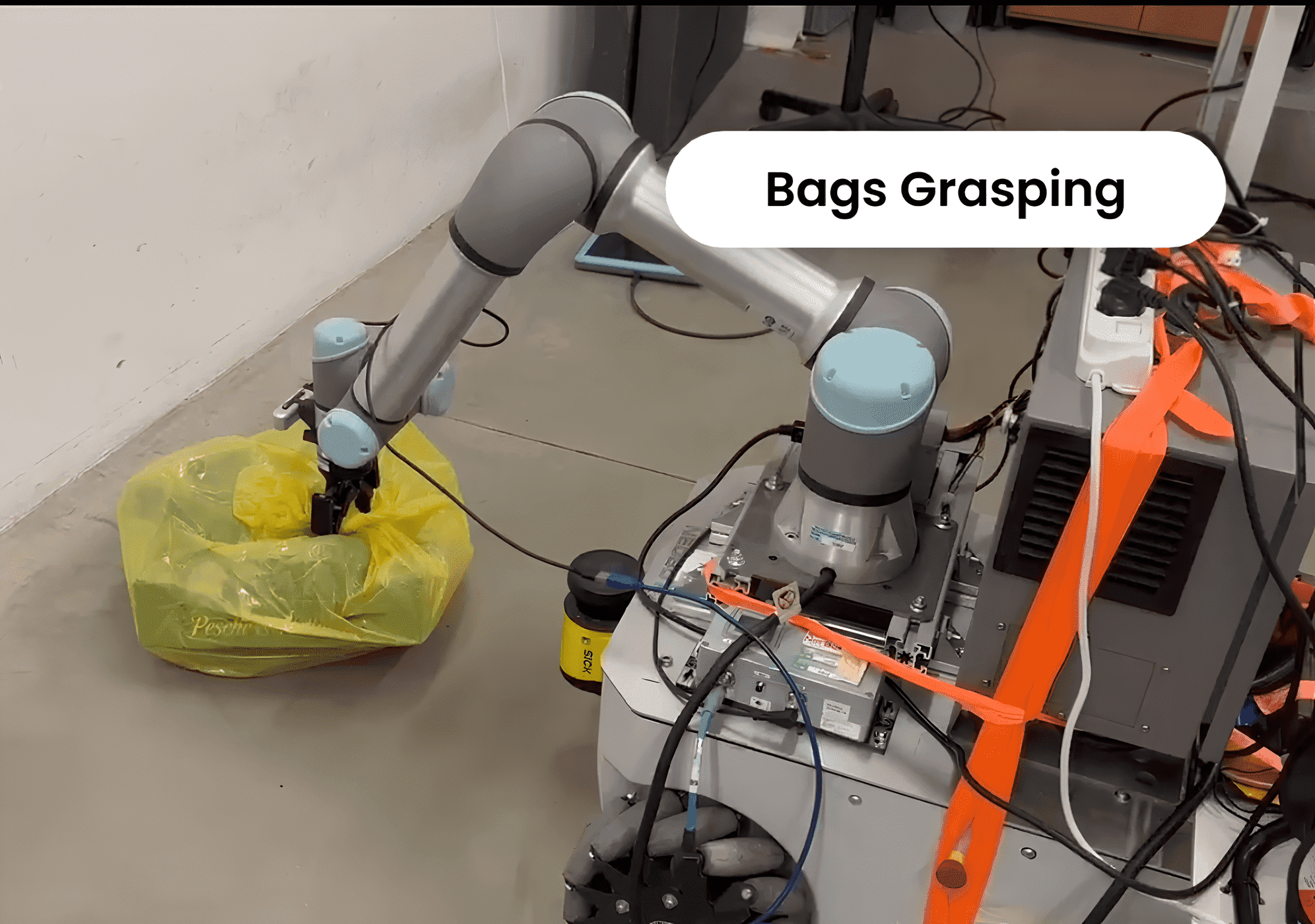
Deformable Object Manipulation
Perception, grasping, co-manipulation, and force-aware interaction with mobile manipulators.
Research
DLO Perception and Grasping
ROS-based cable segmentation, 3D pose estimation, CoppeliaSim validation, and sim-to-real grasp execution.

ProjectRED
Rover Navigation and Digital Twin
Autonomous navigation, localization, obstacle avoidance, and ROS2-Unity simulation workflows.

ProjectRED
Rover Arm and Sampling
Manipulator control, probing, deep sampling, subsystem integration, and field-oriented robotic engineering.
Software
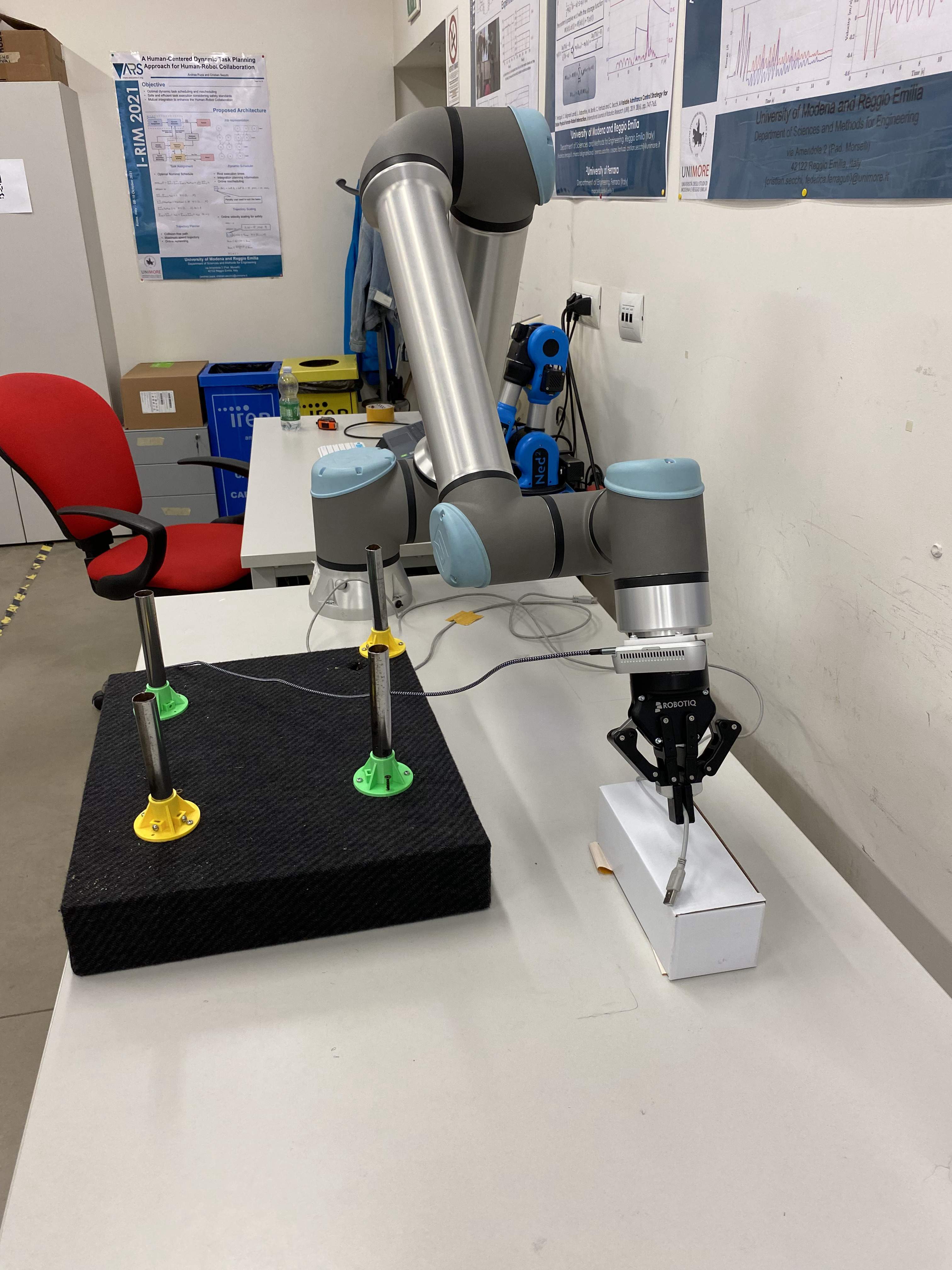
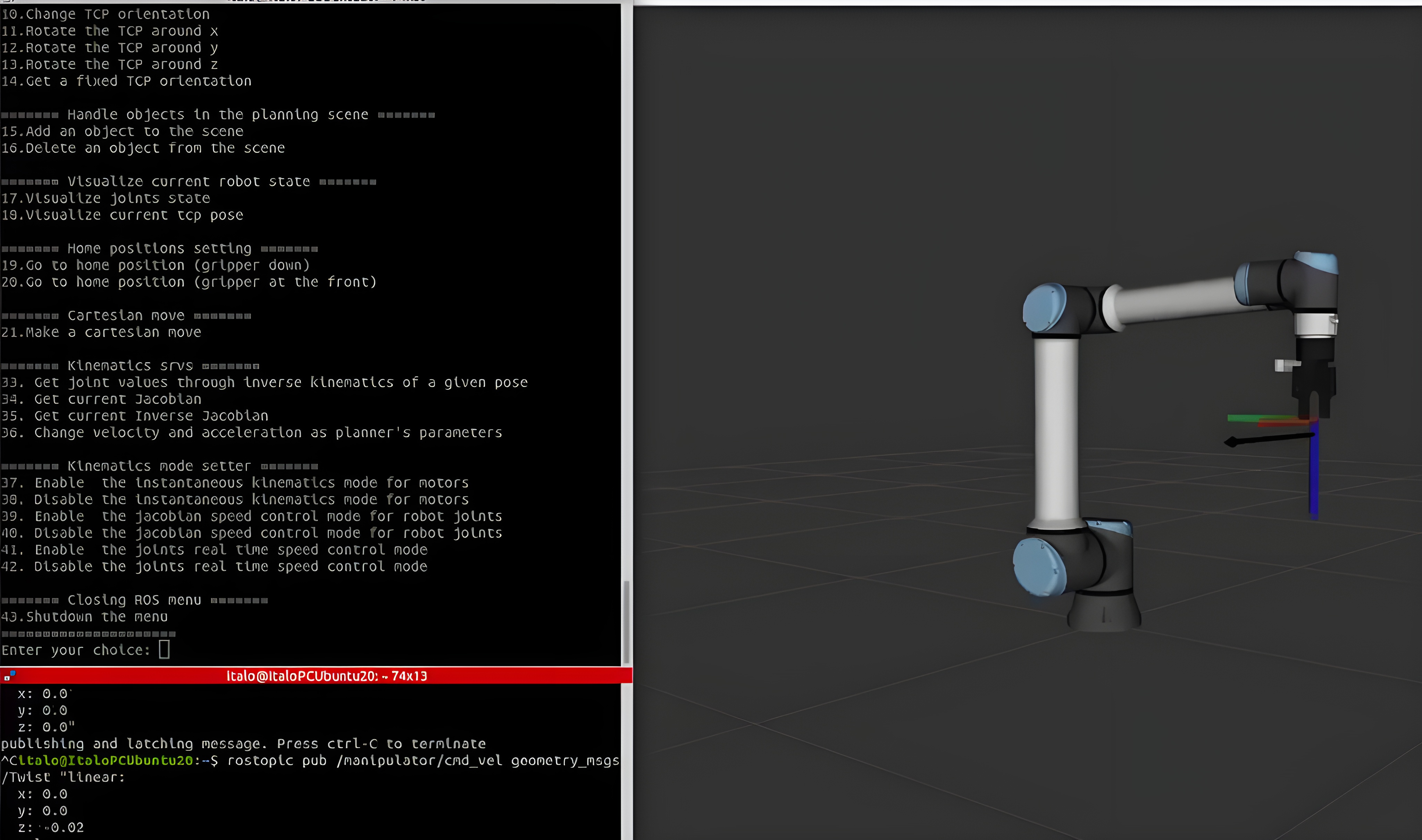
Manipulators Framework
Reusable planning and control software for commercial and custom manipulators.
Engineering profile
Core domains
- Multi-agent and multi-robot coordination
- Robotic soft manipulation
- Autonomous navigation and digital twins
- Perception-driven robotics and AI integration
Main tools
- ROS1, ROS2, MoveIt, Nav2
- C++, Python, MATLAB, RobotStudio
- CoppeliaSim, Unity, Gazebo, MuJoCo
- RGB-D perception (RealSense, Zed2)
- Computer Vision (YOLO, SAM)
- Robotics platforms (Neobotics, MiR, UR)
- STM32, CAN, CANopen, USART/UART
Explore the site
Projects
Detailed pages about research, software, and integrated robotic systems.
Publications
A section for scientific papers, research outputs, and technical references.
News and updates
A dedicated page for future research notes, milestones, opportunities, and announcements.