Manipulator Framework
Project Overview
This project collects the software infrastructure I developed and extended for manipulator planning and control, starting from ROS1-based prototypes and evolving toward more modular ROS2-oriented architectures.
The goal is not a robot-specific controller, but a reusable software layer that can support different manipulators, end-effectors, and task configurations.
My role
This work sits between personal software development and collaborative extensions carried out in broader robotics projects.
- Initial ROS1 implementation during thesis and internship activities
- Reuse and extension in rover and manipulation contexts
- Ongoing evolution toward ROS2 wrappers and cleaner modularity
Design goals
- Modular planner integration
- Manipulator-agnostic software structure where possible
- Clear separation between kinematics, execution logic, and task-level control
- Reusability across simulation and real systems
- Easier extension toward different manipulators and mobile manipulation setups
- Inverse and forward kinematics support
- Real time speed control in both cartesian and joint space
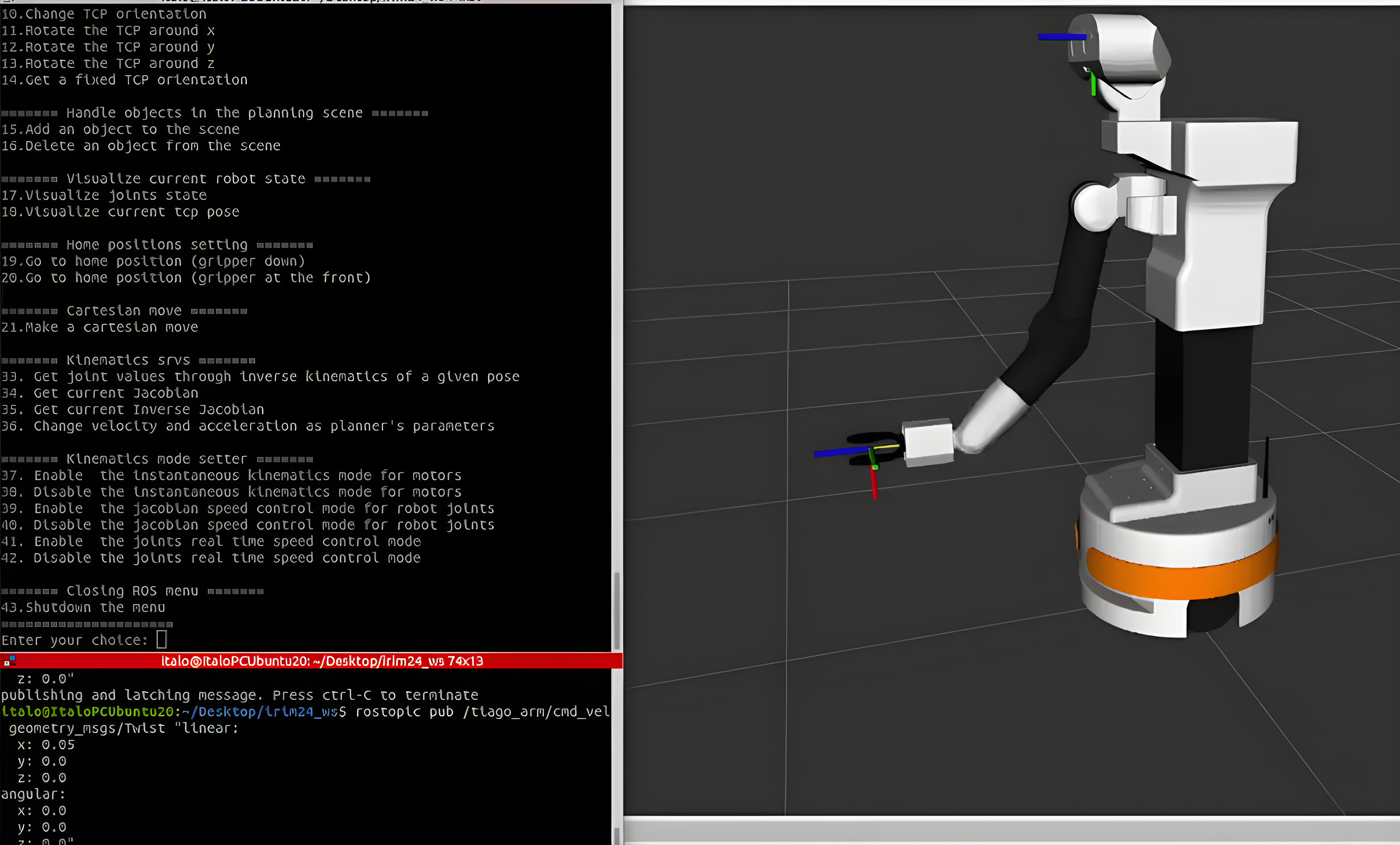
Manipulator functions menu with the TIAGo.
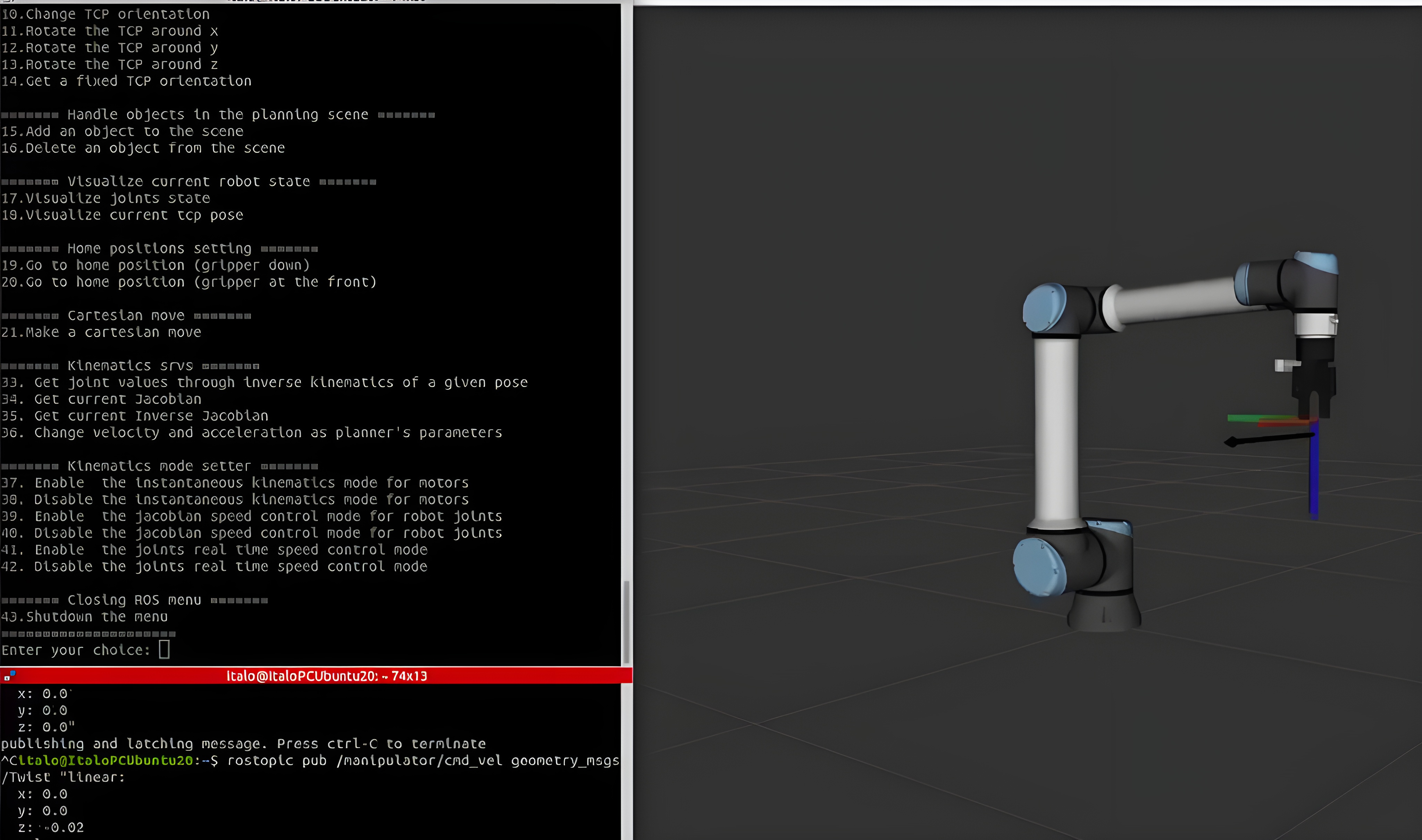
Manipulator functions menu with the UR.