ProjectRED Rover
This page collects the main robotics work I carried out within ProjectRED, including technical and management leadership, software architecture supervision, autonomous navigation, rover manipulation, and subsystem integration.
ProjectRED story and leadership


I joined ProjectRED first as a control software developer, then served as Project Manager, and later continued as external advisor and robotics supervisor.
My contribution spans both engineering execution and leadership responsibilities.
Leadership and coordination scope
- Team leadership for a heterogeneous team
- Planning, task allocation, and technical supervision across software activities
- Budget management experience during the year in which I served as team leader
- Support to software architecture decisions and subsystem integration in later years
- Coordination between control, robotics, and system-level validation efforts
Competition history relevant to my role
- ERC 2022 Remote: 3rd place
- ERC 2023 Remote: 3rd place
- ERC 2023 On-Site: 9th place, highest ProjectRED on-site result so far
- Team budget in my Project Manager year: more than 60k euros
- Team budgets in later years: around 30k euros
Autonomous navigation and digital twin
Project Overview
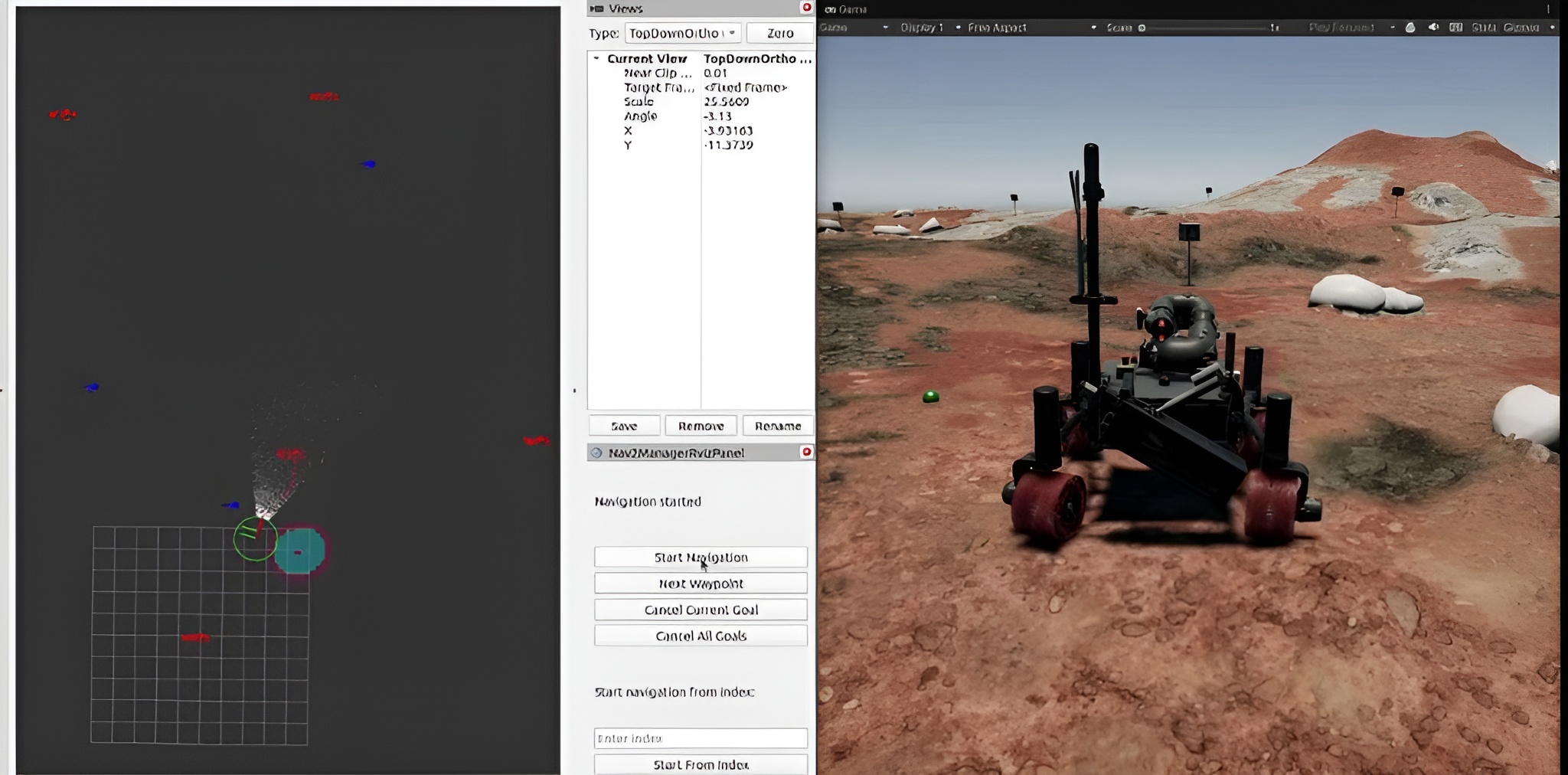
A major part of the rover work focused on autonomous navigation from simulation to field deployment.
I collaborated on the autonomous control architecture of the rover and supervised the construction of a ROS2 plus Unity digital twin used to validate navigation workflows before real-world testing.
Technical content
- High-fidelity Unity plus ROS2 digital twin for validation and testing
- Autonomous navigation stack with real-time obstacle handling
- Localization pipeline combining wheel odometry, visual odometry, and landmark-based estimation
- Simulation-to-reality consistency checks for field deployment
- Nav2-free integration and custom obstacle filtering logic
Rover arm, probing, and deep sampling
Project Overview
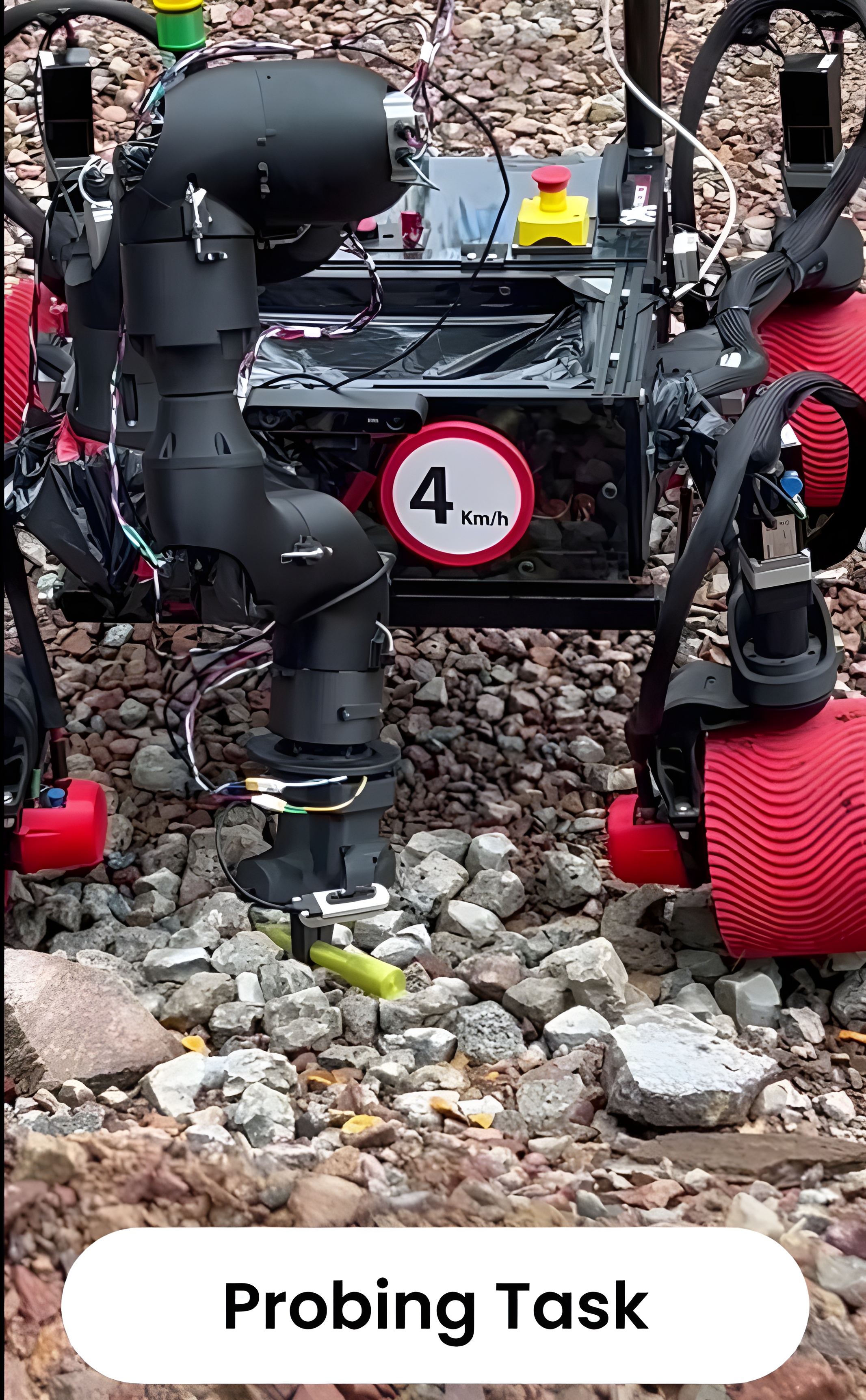
I also collaborated on the robotic arm subsystem and on the integration of science-oriented rover functionalities.
This includes manipulator motion, grasp execution, remote guidance for precise operations, and the coupling between field tasks and robotic control.
Technical content
- MoveIt2-based motion routines and trajectory planning
- CANopen-oriented motor communication and subsystem coordination
- Remote teleoperation for fine motion guidance
- Probe detection for autonomous approach

Drilling and sampling subsystem
The rover platform also included an onboard drill and deep-sampling workflow. In the site structure, this is presented as a collaborative subsystem in which I contributed within a broader team context, rather than as a standalone individual project.
Certificates and public references
Ownership note
ProjectRED is, by nature, a multidisciplinary team effort. This page reflects my actual role: strong direct contribution to robotics and control activities, leadership and coordination responsibilities, and supervision of software architecture and integration, without presenting the overall rover as an individual-only project.